"Ravioli Pasta" design overcomes durability challenges in Flexible Tactile Sensors
Editor: | Mar 13,2025
Resistive flexible tactile sensors have attracted widespread attention in the intelligent robots and wearable bioelectronics fields. Many efforts have been conductued to improve the sensing sensitivity, however, their long-term durability in epidermal sensing applications remains a challenge. Common methods of constructing protective layers often lead to unavoidable interlayer interactions, which adversely affect both hysteresis and stability of the sensor.
Resistive flexible tactile sensors are critical for applications like smart prosthetics, robotic skins, and wearable health devices. However, while sensitivity improvements have dominated research efforts, maintaining stable performance under repeated strain—essential for epidermal or robotic use—has remained elusive. Traditional protective layers often introduce interlayer interactions, degrading sensor hysteresis and stability over time.
Prof. ZHAO Pengjun’s group at Xinjiang Technical Institute of Physics & Chemistry, in collaboration with Prof. YANG Jun at Chongqing Institute of Green and Intelligent Technology, has developed a sensor mimicking the layered structure of ravioli pasta. Using "dual-electrospinning nanofibers" and "spray-coated carbon nanotubes", they embedded a microcracked "island-bridge" sensing layer within a nanofiber film, which has demonstrated excellent sensing capabilities within the strain range of human skin. This 3D architecture enables:
(A) Self-healing microcracks: The structure generates restoring forces to repair microcracks during repeated stretching.
(B) Minimized interlayer interference: Isolation of sensing and protective layers reduces performance degradation.
(C) Human-skin compatibility: Operates effectively within the 0–50% strain range typical for epidermal applications.
Applications ranged from monitoring pulse waveforms and joint movements to controlling robotic hands with precision. In wearable device applications, the flexible strain sensor maintains fast response speed (24 ms) and excellent repeatability (approximate 12,000 cycles) under 50% strain, with high sensitivity (GF = 37.38) and low hysteresis (γ = 3.568%), and is successfully used for real-time physiological signal monitoring and robotic hand control.
"The sensor’s stability under cyclic deformation bridges the gap between laboratory prototypes and practical wearable or robotic systems," emphasized Prof. Zhao.
This breakthrough paves the way for next-generation biomedical devices and human-interactive robotics. The team plans to explore scalable manufacturing and integration with wireless systems for IoT-enabled health solutions.
This work was published in Composites Part B: Engineering, entitled as “Island-bridge microcracks with nanofiber and carbon nanotube composites for high-performance flexible strain sensors" (Composites Part B: Engineering, 2025, Volume 298, 112366), and supported by the Key Research and Development Program of Xinjiang, and the Tianshan Innovation Team Project of XinJiang.
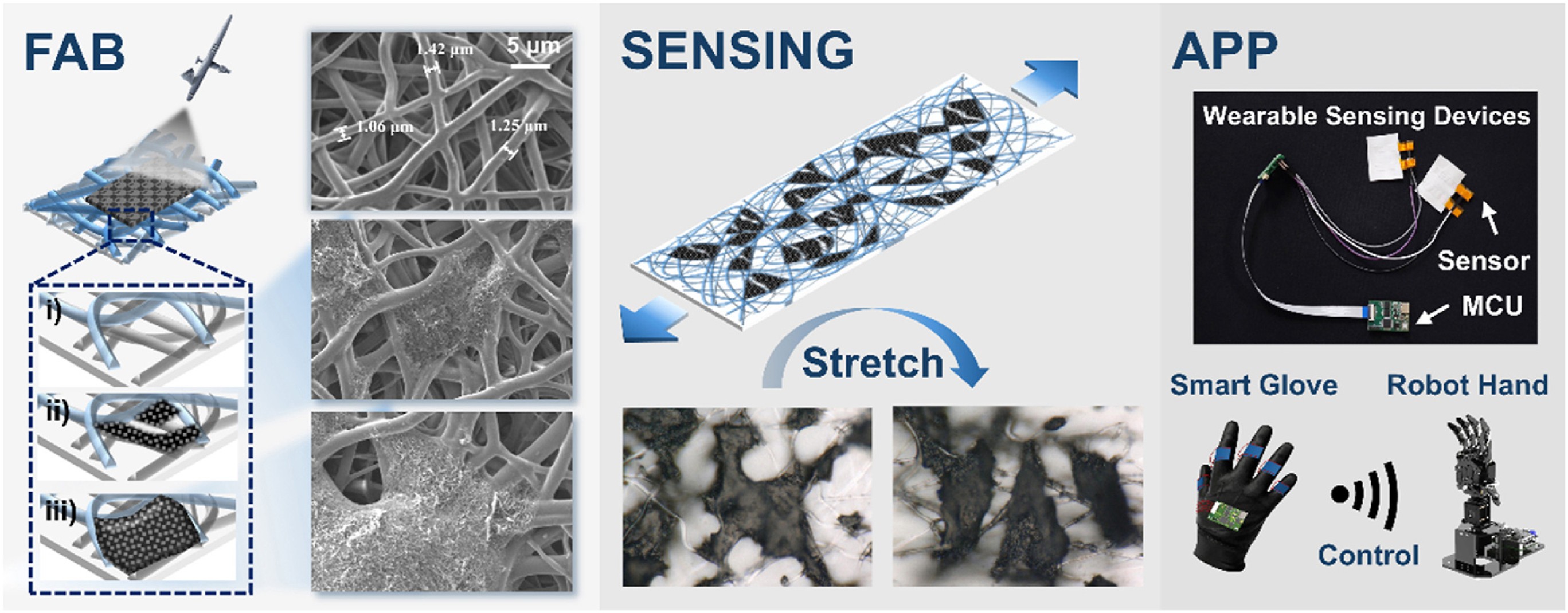
Figure: The island-bridge microcrack structure, flexible tactile sensor and robotic hand control
附件下载:
 86-991-3835823
86-991-3835823 lhszhb@ms.xjb.ac.cn
lhszhb@ms.xjb.ac.cn 86-991-3838957
86-991-3838957 40-1 Beijing Nan Road, Urumqi, Xinjiang, 830011, China
40-1 Beijing Nan Road, Urumqi, Xinjiang, 830011, China

Copyright @ Xinjiang Techinical Institute of Physics and Chemistry, Chinese Academy of Sciences. All Rights Reserved
